Шаговый и бесколлекторный двигатели во многом похожи друг на друга. Рассмотрим их основные особенности, различия и попробуем определить, какой двигатель лучше.

В предыдущем материале – «Двигатели бывают разные», мы предельно кратко рассмотрели основные виды существующих низковольтных синхронных двигателей постоянного тока и сказали несколько слов о принципах их работы. При этом, мы намерено не углублялись в детальное рассмотрение особенностей устройства и принципов работы этих двигателей и, тем более, в сравнение различных типов двигателей с точки зрения их рабочих характеристик и особенностей эксплуатации. Это большая, отдельная и неоднозначная тема для разговора и часть этого вопроса мы попробуем рассмотреть далее.
Вопрос выбора того или иного типа двигателя для решения своей задачи становится причиной непроходящей головной боли для любого разработчика, столкнувшегося с приводными системами. Что выбрать? Дешевый и простой вариант? Мощный и гибкий, но сложный в управлении? Однозначного ответа на этот вопрос нет и, безусловно, не может быть – выбор конкретного типа двигателя и принципа организации системы управления движением теснейшим образом завязан на конкретную решаемую задачу – характер потребного движения, требования к управлению приводом и нагрузкой, допустимость прокладки кабельных соединений и пр. Список вопросов обширен.
Не претендуя ни на полноту, ни на всесторонность сравнения, мы сейчас попробуем разобраться в главном вопросе, терзающем разработчиков устройств разнообразных типов и назначений – так что же лучше – шаговый или бесколлекторный двигатель?
Как мы уже говорили ранее, шаговый и бесколлекторный двигатели во многом похожи друг на друга. Обе конструкции имеют статор, сформированный электрическими обмотками, генерирующими магнитное поле, и ротор, состоящий из постоянных магнитов, катушек с переменным магнитным сопротивлением или смеси первого и второго. В обоих случаях, для работы двигателя, необходимо решать проблему последовательного переключения питания обмоток статора для организации вращения ротора. В обоих случаях эта проблема решается схемотехническими и логическими ухищрениями, а не механическим устройством (щеточно-коллекторным блоком), как в коллекторных двигателях. Однако, на этом сходства двух типов двигателей заканчиваются и начинаются существенные различия.
Итак, давайте разбираться:
Шаговые двигатели
Начнем с того, какие бывают шаговые двигатели. Уже упоминалось, что по принципу организации ротора шаговые двигатели подразделяются на двигатели с ротором на постоянных магнитах (самый похожий на бесколлекторный двигатель тип), двигатели с ротором на катушках с переменным магнитным сопротивлением и гибридные двигатели – т.е. с ротором, объединяющим первый и второй тип.
Гибридные шаговые двигатели являются наиболее используемым типом этого вида приводов – считается, что гибридная конструкция ротора позволяет объединить наилучшие черты, как двигателей м переменным магнитным сопротивлением, так и двигателей с постоянными магнитами. В частности, гибридные шаговые двигатели позволяют развивать большие скорости работы и крутящие моменты (в сравнении с шаговыми двигателями других типов) и обеспечивать меньший размер единичного шага.
Принцип работы шагового двигателя
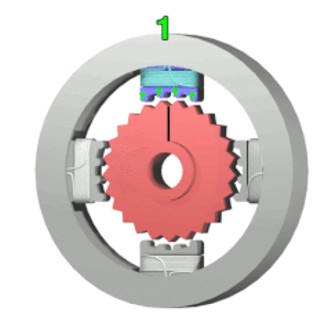
Принцип работы шагового двигателя предельно прост. Ротор шагового двигателя конструктивно устроен таким образом, что в нем присутствуют ярко выраженные зубцы магнитного поля. В сочетании с конструкцией статора, состоящего из отдельных пар электромагнитных катушек, как правило намотанных на профилированные сердечники, это, при переключении питания между парами обмоток, обеспечивает четкое перемещение ротора на строго определенный угловой шаг в направление переключения обмоток статора. Одно переключение – один четкий угловой шаг. Все просто.
Таким образом для управления шаговым двигателем нам, в норме, требуются только две командные цепи – «шаг» - цепь по которой передается последовательность импульсов включения обмоток и «направление» - определяющая в каком направлении (по часовой стрелке или против) переключаются пары обмоток и, соответственно, вращается ротор.
Количество шагов на оборот ротора зависит от конструкции двигателя. По сути, чем больше полюсов обмотки статора и магнитных зубцов ротора, тем больше шагов может сделать двигатель за полный оборот и, соответственно, тем меньше шаг. Однако, на практике, существуют фундаментальные ограничения, не позволяющие уменьшать шаг до бесконечности. На данный момент на рынке присутствуют, преимущественно, шаговые двигатели с единичным шагом в пределах от 1.8° до 7.5° - именно в этом диапазоне удается получать наиболее стабильные по качеству и повторяемости технических характеристик изделия.
Преимущества шаговых двигателей
Уже из этого небольшого обзора становятся понятны некоторые преимущества шаговых двигателей – в первую очередь это предсказуемость поведения и простота управления. Да, для шагового двигателя требуется модуль управления, традиционно называемый –драйвер, однако для управления самим драйвером достаточно всего двух командных сигналов – «шаг» и «направление». Кроме того, для определения текущего положения нагрузки, подключенной к ротору, требуется только элементарный счетчик шагов – при постоянстве длины шага (заданном конструкционно), угол поворота определяется тривиальной математической процедурой.
Более того, в общем случае, шаговые двигатели существенно дешевле других типов приводов.
Казалось бы, этот набор преимуществ определяет доминирование шаговых двигателей во всех отраслях промышленности. Тем не менее это не так. Более того, бесколлекторные и моментные двигатели успешно вытесняют шаговые двигатели даже в тех областях производства, где, традиционно, стоимость является одной из ключевых характеристик. Почему?
Недостатки шаговых двигателей
Начнем с того, что в бочке меда простоты и дешевизны шагового двигателя есть существенная ложка дегтя. И связана она, как ни странно, также с ключевой конструктивной особенностью шагового двигателя.
Несложно догадаться, что ярко выраженный зубцовый эффект шагового двигателя – основа его функционирования, приводит к абсолютной невозможности обеспечить плавное вращение ротора шагового двигателя и, соответственно, его нагрузки. Все вращение шагового двигателя – это последовательность единичных шагов, совершаемая с некоторой скоростью. Каждый шаг, это так или иначе, четко различимый рывок ротора, связанный с переключением магнитного зубца ротора из одного квазистабильного состояния, созданного обмотками статора, в другое.
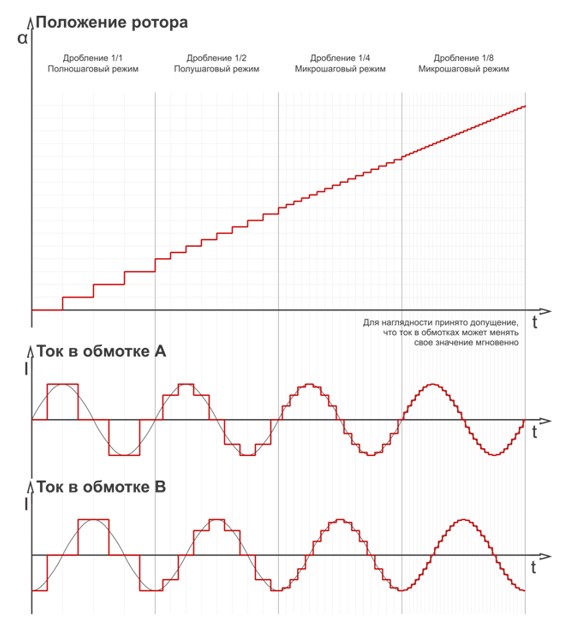
Да, существует режимы микрошагов и разнообразные ухищрения, позволяющие сгладить ход ротора шагового двигателя. Однако, во-первых, исправить ситуацию полностью невозможно (из-за самих конструктивных особенностей), а во-вторых, подобные ухищрения требуют применения уже гораздо более сложной и дорогой электроники управления…
Кроме того, принцип работы шагового двигателя приводит к ряду не вполне очевидных, но, в некоторых случаях, крайне существенных эффектов.
Первое и самое явное ограничение – шаговый двигатель сложно заставить повернуться на угол, меньше единичного шага. Существуют драйверы и конструкции двигателей, позволяющие, при необходимости, выполнять поворот на пол шага, однако ротор, замороженный в таком состоянии нестабилен и испытывает непрерывную флуктуацию вокруг своего положения. Для шагового двигателя, положение в пол шага является даже не квазистабильным (как при повороте на шаг), а просто неустойчивым.
Из-за, описанных выше, особенностей работы шаговый двигатель производит ощутимую вибрацию, что в ряде случаев может приводить к попаданию в резонансные частоты монтажной конструкции. Также вибрация может передаваться на элементы нагрузки, что пагубно сказывается на точности и конструктивной жесткости, особенно в случае приводов линейного перемещения. Эта особенность существенно ограничивает, например, предельные размеры рабочей зоны промышленного оборудования (обрабатывающих комплексов и других станков, требующих позиционирования).
Более того, из-за специфики переключений и зубцового эффекта, шаговый двигатель генерирует при работе значительные электромагнитные помехи, что делает его применение в ряде областей, крайне нежелательным. Простой пример – шаговый двигатель в регулируемой опоре медицинской кровати… Пищат, приборы, бегут врачи, аврал и паника… А ничего страшного – просто пациент устал лежать и решил приподнять спинку кровати. Двигатель в опоре создал помеху на монитор кардиоритма… Ну и понеслось…
Думаете – утрирую? Ну, возможно… немного.
Есть у шаговых двигателей и другие недостатки, связанные с техническими характеристиками. В общем случае, соотношение габарит/производительность или вес/производительность, при сравнении разных типов двигателей, оказываются не в пользу шаговых.
Итак, шаговые двигатели не идеальны. А для ряда отраслей и вовсе не желательны. Есть ли альтернатива?
Бесколлекторные двигатели
Как несложно догадаться из преамбулы этой статьи, наиболее употребимой альтернативой шаговым двигателям являются различные модификации бесколлекторных двигателей на постоянных магнитах.
В чем же разница между принципами работы и конструкцией шагового двигателя, и конструкцией и принципом работы бесколлекторного двигателя?
Принцип работы бесколлекторного двигателя
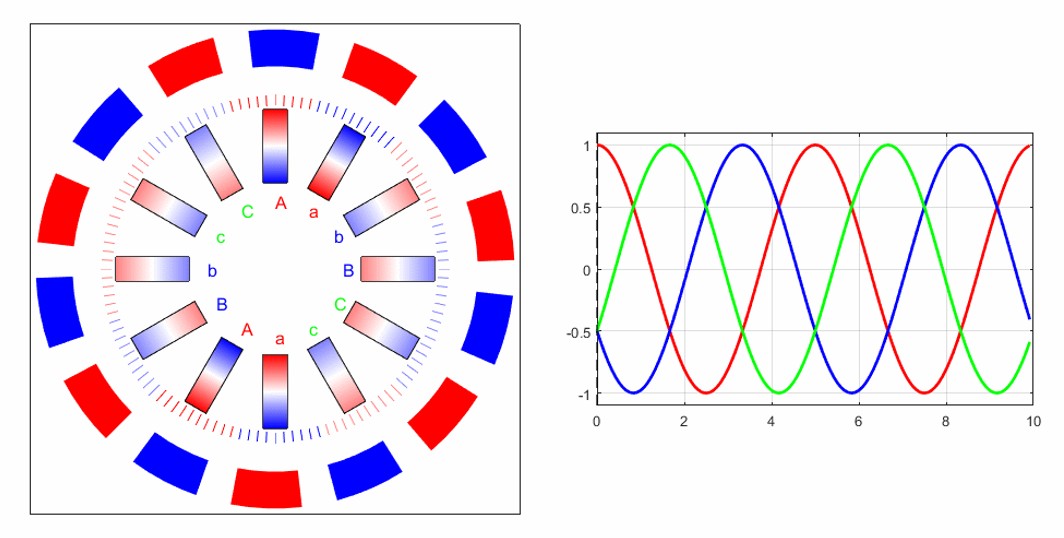
На первый взгляд, и мы это уже упоминали, все очень похоже. Бесколлекторный двигатель состоит из статора, сформированного электромагнитной обмоткой сложной конструкции – полой (наиболее прогрессивное решение) или намотанной на сердечник (сердечники) и ротора, собранного из блока мощных постоянных магнитов. Для управления приводом так же требуется электронное устройство, в случае бесколлекторного двигателя, обычно называемое – контроллер. Контроллер переключает фазы обмотки статора, формируя непрерывную гладкую волну электромагнитного поля, магнитные полюса ротора следуют за фронтом волны в сторону ее движения. Все просто, но, как говориться – есть нюанс.
В бесколлекторном двигателе, особенно с полой обмоткой, отсутствует конструктивный зубцовый эффект. Более того, зубцовый эффект для бесколлекторного двигателя, считается паразитным явлением и всячески, конструктивно, минимизируется. Но в этом случае возникает вопрос – каким образом контроллер должен переключать фазы обмотки так, чтобы момент переключения происходил в оптимальный момент, при переходе полюсов магнитов ротора из области действия одной фазы обмотки в другую? Как предоставить контроллеру информацию о текущем положении полюсов магнита ротора и фронта электромагнитной волны в обмотке?
Для этого, в конструкцию бесколлекторного двигателя включена печатная плата, с размещенными на ней датчиками Холла. Как правило, датчиков три и размещены они, соответственно, под углом в 120° друг к другу.
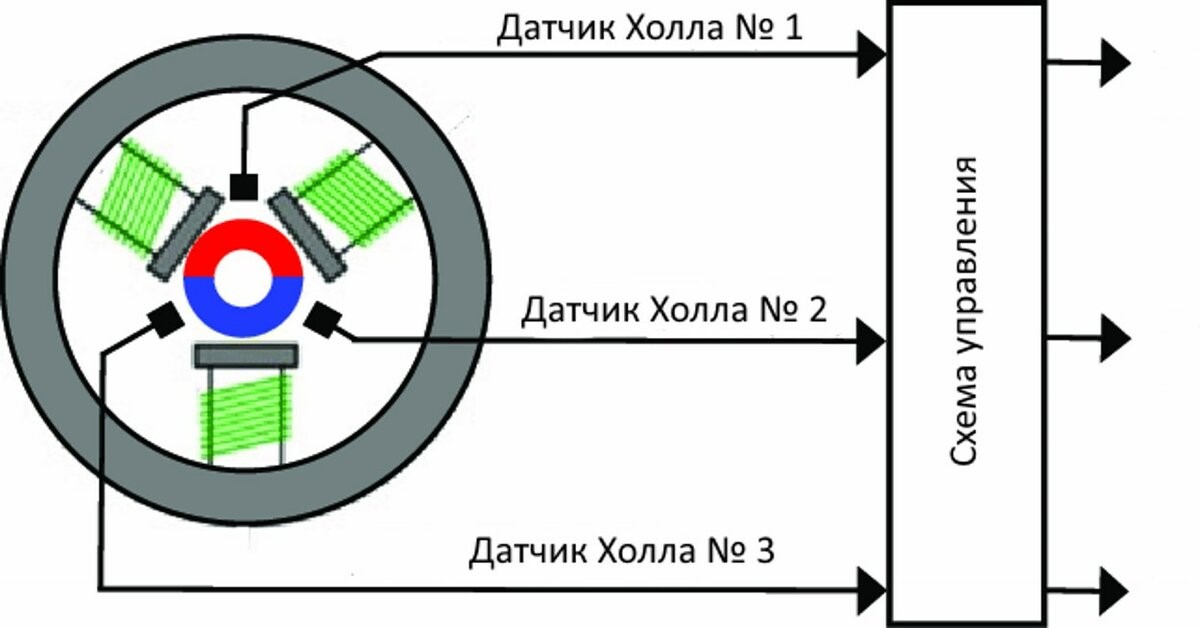
Сигнал, поступающий на контроллер с этих трех датчиков, в сочетании с предварительно указанным контроллеру количеством пар полюсов магнитов ротора двигателя, позволяет однозначно определить положение ротора двигателя в любой момент времени и предельно своевременно обеспечивать переключение фаз обмотки. Таким образом обеспечивается плавное непрерывное вращение двигателя на любых скоростях (от минимальных до максимальных рабочих).
Также, естественно при условии качественного изготовления двигателя, балансировка обмотки и надежные опорные подшипники ротора исключают возникновение вибрации двигателя и ее распространение по нагрузке и элементам конструкции. Отсутствие квазистабильных состояний и плавное движение фронта электромагнитной волны по обмотке обеспечивают предельно низкий уровень, производимой двигателем, электромагнитной помехи. Как правило весь «объем» помехи эффективно гасится конструктивными элементами двигателя и не выходит за пределы его корпуса – такие двигатели могут безопасно использоваться в непосредственной близости от чувствительного оборудования – медицинского, лабораторного, промышленного. Аналогичное утверждение относится и к контроллерам бесколлекторных двигателей – как правило, эти устройства соответствуют самым строгим требованиям современных стандартов по электробезопасности, в том числе и по электромагнитной совместимости.
Особенности бесколлекторных двигателей
Из уже описанного видно – управлять бесколлекторным двигателем существенно сложнее чем шаговым. Такие двигатели требуют значительно более совершенной и, следовательно, дорогой электронной оснастки. Однако, как это часто бывает – эта палка тоже о двух концах. Контроллеры бесколлекторных двигателей – это гибкие многофункциональные устройства, оснащенные поддержкой разнообразных датчиков (сверх датчиков Холла), оснащенные ассортиментом цифровых и аналоговых входов/выходов, позволяющих организовать различные схемы управления, обеспечить простой, удобный и интуитивно понятный интерфейс взаимодействия, интегрировать привод в более сложную глобальную систему контроля.
Контроллеры бесколлекторных двигателей, в зависимости от своего назначения и сложности, реализуют два или три вложенных контура управления. Контур тока – обеспечивает точное управление и контроль уровней тока в обмотках двигателя для обеспечения оптимальной величины крутящего момента и предельного снижения токовых потерь в обмотке. Контур скорости – с помощью сигналов датчиков Холла и энкодера (если он присутствует в системе) обеспечивает тонкое управление напряжением на фазах обмотки для поддержания плавности вращения, сглаживания флуктуаций скорости, возникающих из-за эффектов нагрузки, и реализацию различных профилей разгона, торможения и поддержания скорости на траектории движения. Контур положения – при наличии одного или более энкодеров обеспечивает расчёт и исполнение траектории движения, контроль выхода нагрузки в заданное положение, отслеживание положения нагрузки вне фаз движения (перемещение нагрузки под действием внешней силы).
Итак, бесколлекторные двигатели сложнее и дороже шаговых сами по себе и, кроме того, требуют использования более сложной электроники управления. В чем же преимущества их использования?
Преимущества бесколлекторного двигателя
О чем-то мы уже сказали – плавность вращения, возможность работы на малых скоростях, отсутствие ограничений по величине угла поворота, удобство контроля и интеграции в сети управления верхнего уровня. Кроме того, бесколлекторные двигатели, как правило, компактнее и легче (при сравнимой или лучшей производительности), они обладают значительно лучшей динамикой движения и соотношением момент/скорость. При сравнимой производительности потребляют меньшие рабочие токи, имеют существенно лучший КПД и меньшие уровни токовых потерь, в большей степени соответствуют требованиям электромагнитной совместимости.
Какой двигатель выбрать - бесколлекторный или шаговый
Главный вопрос – что же лучше – бесколлекторный или шаговый двигатель? Даже основываясь на всем сказанном – однозначного ответа нет. Ключевым встречным вопросом будет – а что Вы хотели бы получить от двигателя?
Вам нужно предельно простом способом открывать и закрывать створку ворот, размер и вес двигателя особого значения не имеет – в таком раскладе дешевый шаговый двигатель вполне осмысленное решение. Хотя даже тут стоит заметить – крупный производитель лифтового оборудования, компания «Отис», некоторое время назад полностью отказалась от использования шаговых двигателей в приводах открывания дверей и заменила их на бесколлекторные. Комментарий менеджмента был примерно следующий – «повышенная стоимость новых приводов полностью компенсируется кратным снижением расходов на текущее обслуживание, ремонт и замену» (не является цитатой).
Открываем вентиляционный люк или люк дымоудалительной системы. Ну, тут просто – если нашелся подходящий по габаритам шаговый двигатель – решение нормальное. Главное следить за исправностью, чтобы в час «Ч» все работало.
Двигаем части медицинской кровати или операционного/процедурного стола – при всем уважении, от шагового двигателя лучше отказаться. Во избежание.
Проектируем промышленную систему с несколькими подвижными осями и точным позиционированием. На вкус и цвет… Но сложность системы управления для любого из типов двигателей будет существенной, а гибкость самих бесколлекторных приводов и их контроллеров обеспечит значительный прирост производительности и эргономичности.
В общем и целом, шаговые двигатели постепенно проигрывают соперничество со старшими бесколлекторными собратьями. Нет, мы не ждем, что шаговый двигатель сойдет со сцены в ближайшее время и канет в пучину истории – ниша для этого неплохого, хоть и специфического типа приводов, найдется. Однако, потребность рынка в большей гибкости, эффективности и адаптивности решений однозначно склоняет чашу весов в сторону более современных бесколлекторных двигателей. А последние тенденции развития рынка выводят на первый план их отдельный подтип – моментные двигатели, о специфике и отличиях которых мы поговорим в каком-нибудь отдельном материале.