Казалось бы, простой вопрос: «Какие бывают двигатели и для чего они нужны?».
Однако, многообразие решений, существующих на современном рынке, и запутанная классификация могут вызывать затруднения даже у опытных разработчиков.
Приступая к циклу материалов о преимуществах и недостатках тех или иных приводных концепций, давайте попробуем сначала разобраться в следующем: какие вообще двигатели бывают и в чем их различие между собой.
Классификация двигателей
Двигатели классифицируют по следующим характеристикам:
по уровню рабочего напряжения:
- низковольтные двигатели — с рабочим напряжением менее 48 В, (иногда этот диапазон продляют до 70 В);
- высоковольтные двигатели — все, что выше означенной ранее границы;
по типу питающего напряжения:
- двигатели постоянного тока;
- двигатели переменного тока;
по характеру синхронизации токовой волны:
- синхронные;
- асинхронные;
по способу питания обмотки:
- коллекторные (они же щеточные) двигатели;
- бесколлекторные двигатели;
по типу формирования электромагнитного поля:
- двигатели с переменным магнитным сопротивлением;
- двигатели с постоянными магнитами;
- гибридные двигатели;
по особенностям эксплуатации:
- двигатели вращения;
- линейные двигатели;
- моментные двигатели;
по особенностям управления:
- шаговые двигатели
- сервоприводы.
На самом деле, бытующих способов классификации и определений двигателей гораздо больше. Приведенные выше - наиболее базовые и общеупотребимые.
Теперь воспользуемся этой классификацией и отбросим часть массива.
Далее нас будут интересовать только синхронные низковольтные двигатели постоянного тока.
Крупные промышленные и тяговые двигатели на переменном напряжении и с асинхронными обмотками оставим в стороне. Это принципиально отдельный жанр и с точки зрения эксплуатации, и с точки зрения организации систем управления.
Еще одна оговорка - строго говоря, двигателями постоянного тока правильнее называть только коллекторные двигатели, так как прочие типы моторов требуют для работы переменный ток специфических форм, которые корректируются устройствами управления.
Однако, эта характеристика, хоть она и не вполне корректна, все же используется, чтобы отличить такие двигатели от синхронных двигателей, рассчитанных на работу от сетевого переменного напряжения - такие тоже существуют.
Если огрубить вопрос еще немного, то классификацию можно ужать до следующих типов:
-
шаговые двигатели на постоянных магнитах, с переменным магнитным сопротивлением и гибридные;
-
коллекторные двигатели на постоянных магнитах;
-
бесколлекторные двигатели на постоянных магнитах (в том числе моментные двигатели);
-
линейные двигатели.
Теперь в нескольких словах о каждом типе.
Шаговые двигатели
Шаговые двигатели - самый старый и простой класс приводных решений.
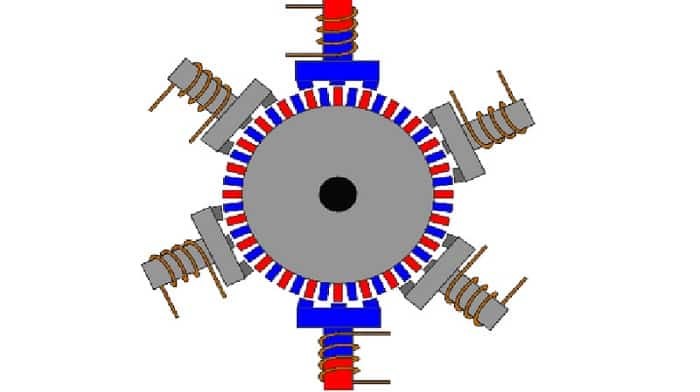
Конструктивно состоит из статора, сформированного электромагнитными катушками (обмотками) и ротора, содержащего постоянные магниты или, что реже, электромагниты с переменным магнитным сопротивлением.
Ротор шагового двигателя имеет конструкцию с ярко выраженными магнитными зубцами (независимо от того как формируется магнитное поле).
Принцип работы шагового двигателя предельно прост: одиночный импульс напряжения на статоре приводит к повороту ротора на один зубец (шаг) в соответствии с направлением на включенную пару обмоток. Следующий импульс - еще шаг. Типичное количество шагов на оборот ротора составляет от 100 до 400, т.е. единичный шаг составляет от 3.6° до 0.9°. Как видно, управлять шаговым двигателем просто. Как правило для этого требуется устройство управления - драйвер, формирующий последовательности переключения катушек статора в определенном направлении. При необходимости, оператор может обойтись и без драйвера, хотя, конечно, так обычно не делают.
Коллекторные двигатели
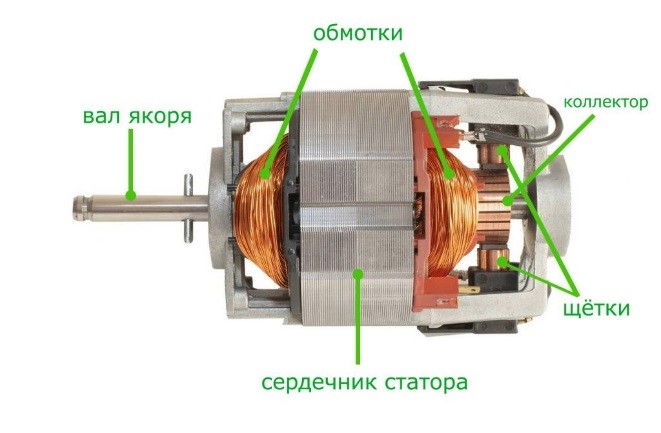
Коллекторный двигатель представляет собой механически более сложную конструкцию. В нее входит статор, сформированный сборкой постоянных магнитов и электрическая обмотка сложной формы, выполняющая функцию ротора.
Сложность конструкции заключается в необходимости передачи питающего напряжения на быстро вращающуюся обмотку. Для этих целей служит механический коллекторный узел, состоящий из двух неподвижных щеток и вращающегося коллектора, сформированного набором контактных площадок. При вращении ротора щетки скользят по контактным площадкам коллектора, передавая питание на соответствующие площадкам фазы обмотки ротора.
Как понятно из конструкции, чисто механический способ переключения позволяет использовать коллекторный двигатель без какой-либо управляющей электроники - достаточно обеспечить на коллекторном узле питание постоянным током, пропорциональным по величине скорости вращения и крутящему моменту.
Бесколлекторные двигатели
Бесколлекторный двигатель - это устройство, на первый взгляд, очень похожее на шаговый двигатель с ротором на постоянных магнитах.
Конструктивно бесколлекторный двигатель состоит из статора, сформированного электрической обмоткой сложной конструкции, и ротора, собранного из постоянных магнитов.
С точки зрения механики, такая конструкция проще коллекторного двигателя - в ней не требуется передача питания на вращающуюся обмотку. С другой стороны, коммутация витков обмотки статора, для создания непрерывной электромагнитной волны, требует знания о текущем положении фронтов этой волны и точного расчета момента переключения фаз обмотки.
Для осуществления этих функций бесколлекторному двигателю требуется управляющее устройство - контроллер и комплект датчиков обратной связи (как правило на эффекте Холла), поставляющих контроллеру информацию о текущем состоянии дел в обмотку двигателя.
Основным отличием бесколлекторного двигателя от шагового является отсутствие в конструкции обмотки (по крайней мере у хорошего двигателя) выраженных зубцов магнитного поля. Эта особенность позволяет снизить уровень магнитной фиксации (зубцовый эффект) и обеспечивает плавность вращения двигателя в том числе и на низких оборотах. Подробнее о преимуществах и недостатках бесколлекторных двигателей в сравнении с шаговыми будет говориться в отдельном материале «Шаг… поворот…».

Линейные двигатели
Линейный двигатель - это особый, отдельный жанр двигателестроения.
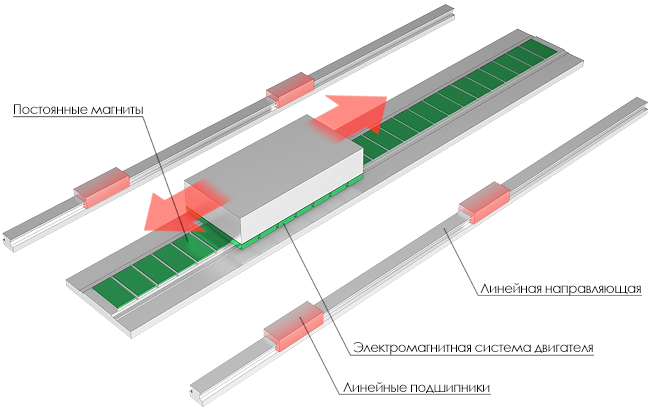
Если подходить к вопросу строго - его следовало бы исключить из текущего рассмотрения, поскольку и его конструкция, и, главное, назначение разительно отличаются от всех двигателей, рассмотренных ранее. Тем не менее, о линейном двигателе стоит упомянуть по двум причинам. Во-первых, эти двигатели становятся все более популярны и востребованы. Во-вторых, линейный двигатель - это, по сути, специфический вариант моментного, т.е. бесколлекторного двигателя, в котором блок постоянных магнитов (статор) развернут в линейный трек, а электрическая обмотка (ротор) собрана в плоскую каретку, скользящую над (или под) треком.
Встречается и обратная конструкция - с обмоткой в треке и постоянными магнитами в каретке.
Основное отличие линейного двигателя от рассмотренных ранее следует из его конструкции: перечисленные двигатели реализуют вращательное движение нагрузки, а линейный создает поступательное движение.
Да, естественно, и шаговый, и коллекторный, и даже моментный двигатели можно использовать для создания линейного движения. Это потребует использования механических приспособлений - реечных, червячных или шариковинтовых передач. Но только линейный двигатель изначально, конструктивно и функционально создан для непосредственного поступательного движения. Вопросы конструкции, управления и использования линейных двигателей мы (если потребуется) более подробно рассмотрим в отдельном материале.
Какой тип двигателя лучше выбрать?
Итак, двигатели действительно бывают разные. Какой же из них лучше?
Этим вопросом задается любой инженер, столкнувшийся с необходимостью обеспечить подвижность своего изделия. Увы, универсального ответа на этот вопрос нет и быть не может. Каждый из типов двигателей, кратко описанных в этой статье, одновременно имеет и преимущества, и недостатки. Универсальных решений не существует.
Разобраться и определить для себя правильный тип двигателя, не говоря уже о конкретной модели в пределах типа, под час очень сложно. Для этого необходимо глубокое понимание особенностей функционирования и эксплуатации тех или иных приводов и систем управления движением, сочетаемости и предельных характеристик этого оборудования, вопросов обеспечения рабочих режимов и надежности. Задача сложная и не всегда выполнимая даже для квалифицированного разработчика, если он, конечно, не специализируется на системах движения.
К счастью, поставщики приводного оборудования и систем управления движением обладают знаниями, квалификацией и возможностью привлекать ресурсы производителей, что позволяет им осуществлять грамотный подбор и уточнять основные нюансы эксплуатации.
Тем не менее, только от Заказчика зависит насколько полным и обоснованным будет подбор.
При составлении технического задания нет неважной информации. Чем больше подробностей и ограничений будет указано, тем выше шанс, что подбор будет выполнен правильно, и оборудование, каким бы оно ни было, будет радовать своей качественной и безотказной работой.
С другой стороны, чем больше деталей будет упущено, вне зависимости от того, кажется ли эта информация несущественной или относится к материалам для ограниченного доступа - тем выше вероятность того, что оборудование будет подобрано неверно, что приведет к поломкам, отказам, аварийным ситуациям.
На протяжении многих лет наши специалисты, связанные с поставками приводных комплектующих, многократно сталкивались с ситуациями, когда непонимание заказчиком физических принципов работы оборудования и его характеристик, а главное, умолчание о существенных особенностях конструкции целевого изделия или особенностях его эксплуатации приводили к серьезным последствиям - когда забавным, а когда и трагическим.
Не стесняйтесь указать в ТЗ лишнее – наш профессионал, который будет с ним работать, сам отбросит неважное. Опасайтесь не указать существенное и тем обречь себя на финансовые, временные и репутационные потери.